|
I am a PhD Student at the University of Zaragoza. My research goal is to perform SLAM and Visual Place Recognition (VPR) in the specific domain of colonoscopies, with the aid of Deep Learning techniques. I am pursuing my PhD (finishing by EOY 2024) under the guidance of Prof. J.M.M Montiel at the Robotics Lab in the Universidad de Zaragoza. My work experience includes research internships at Leica Geosystems and Google, both related to SLAM algorithms. Email / LinkedIn / Google Scholar / Github |

|
|
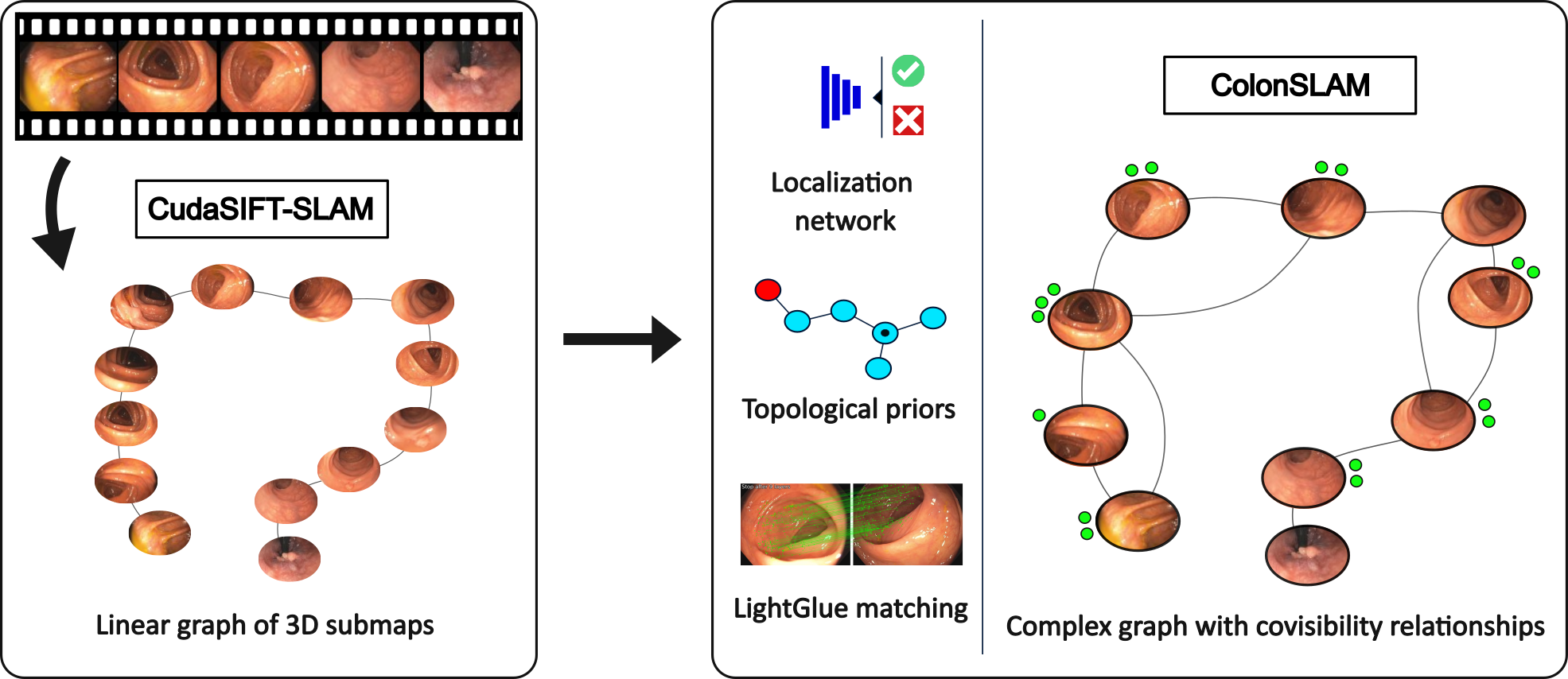
Javier Morlana, Juan D. Tardós, J.M.M. Montiel MICCAI, 2024 The first topological SLAM able to builds rich graphs of the colon. It leverages on the good short-term covisibility of a metric SLAM and the long-term VPR capabilities of deep features. Using topological priors, it is able to build an accurate topological map, which is a key step towards navigation assistance and disease monitoring. |
|
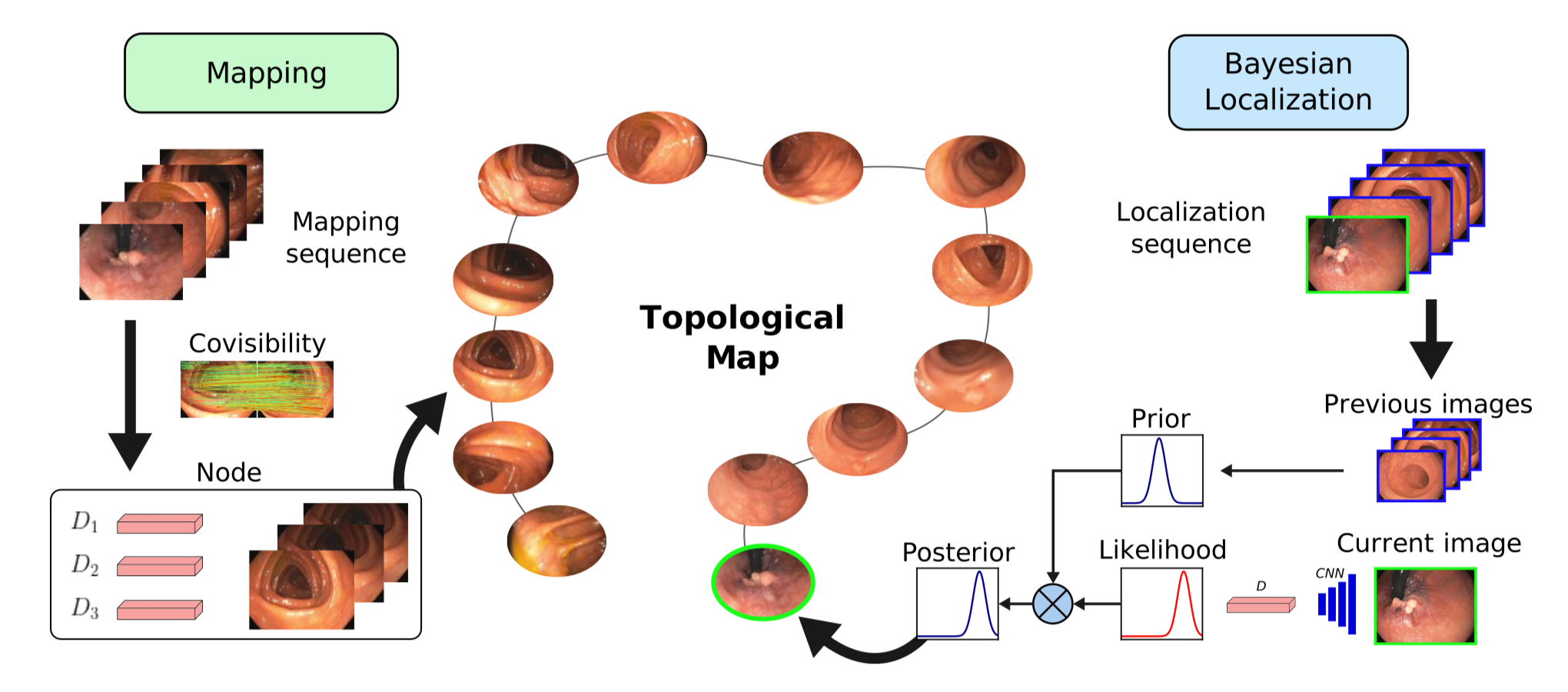
Javier Morlana, Juan D. Tardós, J.M.M. Montiel ICRA, 2024 The first topological mapping and localization system for the whole colon. In the first stage, it builds linear topological map of the colon from a first sequence of a patient. In a second stage, it localizes another sequence of the same patient against the previously built map. |
|
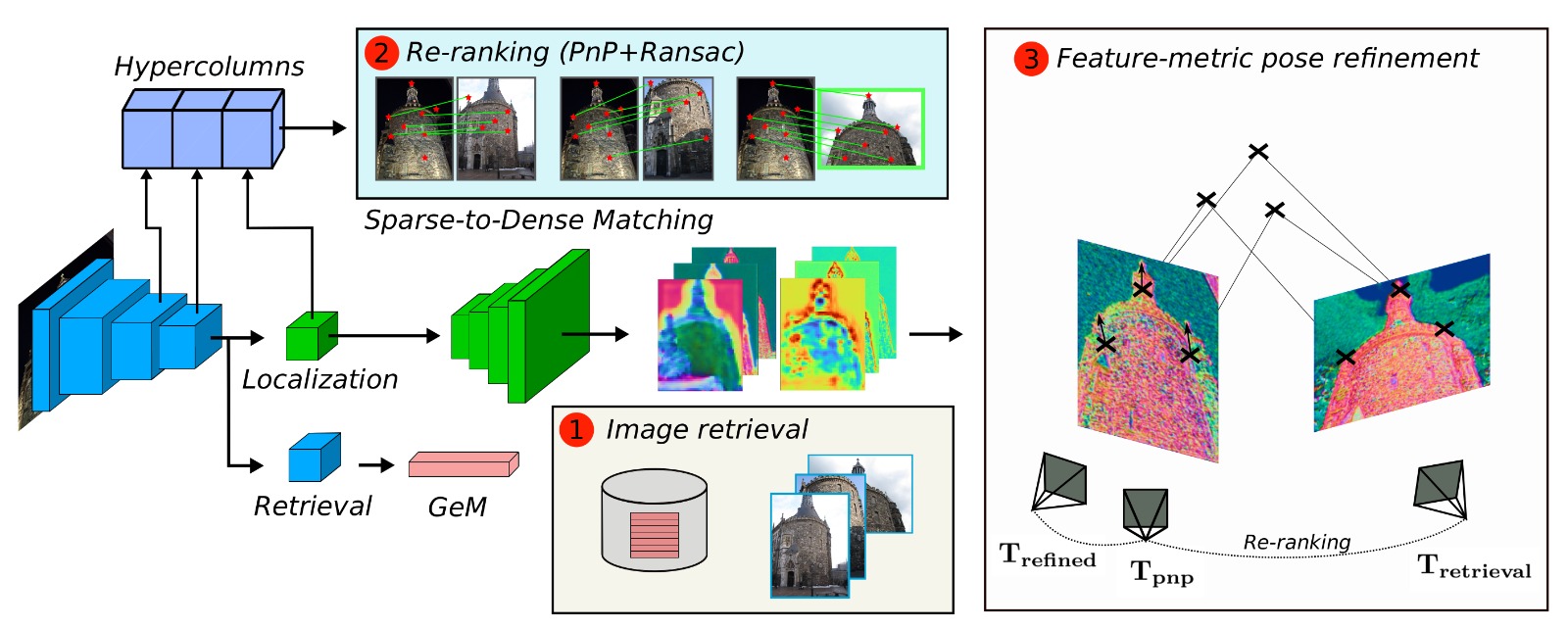
Javier Morlana, J.M.M. Montiel ICRA, 2023 A pipeline that combines all the features needed for Visual Localization in a single network: Image Retrieval, Local Feature Matching and Re-ranking, and Feature-metric alignment. |
|
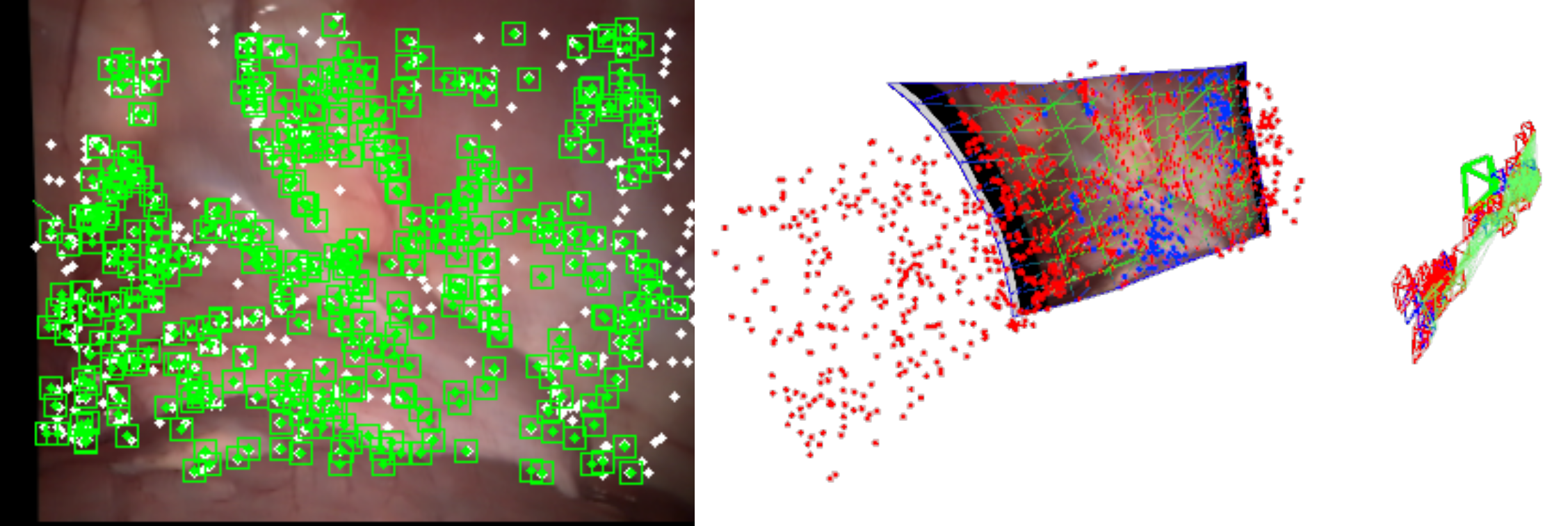
Juan J. Gómez-Rodríguez, José Lamarca, Javier Morlana, Juan D. Tardós and José M.M. Montiel ICRA, 2021 A Semi-Direct direct monocular SLAM system that is able to handle deformable and intracorporeal scenes. It is able to handle deformations, occlusions and to relocalize after tracking failures. |